ʵ��� ����������ۺ�Ӧ��ʵ��֮һ
����ֱ������ջ�����ʵ��
һ ʵ��Ŀ�ģ�
1���˽�ֱ������ջ����ٷ���
2���˽� PID ���ƵĹ��ɼ��㷨
3���˽�����Ӧ�õıջ�ϵͳ�ṹ
�� ʵ���豸
TDN86+ ��ѧʵ��ϵͳ
ֱ��������� TDN86ʵ��ϵͳ�ϣ�
�� ʵ��ԭ��
1��ʵ��ԭ��������
ʵ��ԭ��ͼ
2�� ʵ������ͼ
3��ʵ��ԭ��
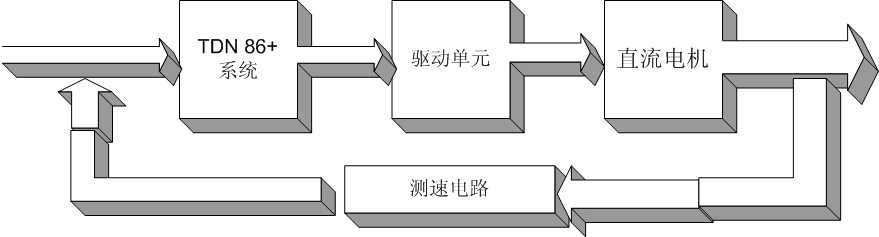
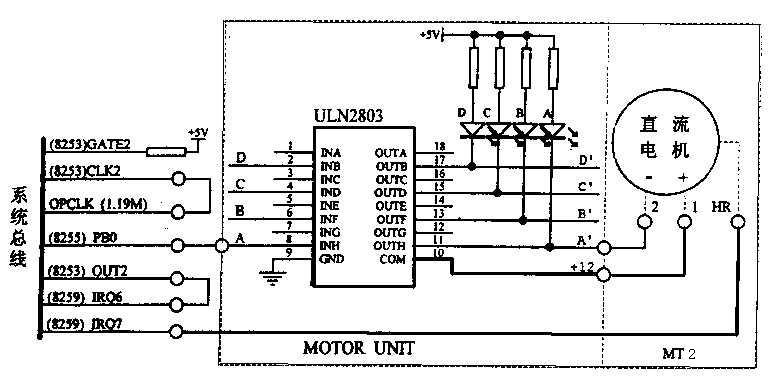
ϵͳ����PWM���Ƶ��ת�٣������ź��� 8255 PB0 �ṩ�����źž�������·���������ת����������Ԫ������������źż�¼���ת�ٹ��ɷ��������ڲ�����������£��� PID ���㣬����������Ƶ�PWM������������ڿ����������£�������ת�ٱջ���ת������ OPCLKΪ1.193MHz ʱ���źţ��� 8253 �� 2 ��ͨ����Ƶ��� 1 ms �ķ��������� 8259 ���� IRQ6 �жϣ���Ϊϵͳ����ʱ�ӣ�PB0 ���� PWM ��������źţ�8259 �� IRQ7 ���ջ�������Ԫ����������岢�����ж����ڲ������ת�١�
4�� �����
STACK SEGMENT STACK
DW 64 DUP(?)
TOP LABEL WORD
STACK ENDS
DATA SEGMENT ;���ݶ��о�������������
TS DB 14H
SPEC DW 0030H
IBAND DW 0060H
KPP DW 1060H
KII DW 0010H
KDD DW 0020H
CH1 DB ?
CH2 DB ?
YK DW 0
CK DB 0
VADD DW 0
ZV DB 0
ZVV DB 0
TC DB 0
FPWM DB 01H
CK_1 DB 0
EK_1 DW 0
AEK_1 DW 0
BEK DW 0
AAAH DB 7FH
VAA DB 7FH
BBBL DB 0
VBB DB 0
MARK DB 0
R0 DW 0
R1 DW 0
R2 DW 0
R3 DW 0
R4 DW 0
R5 DW 0
R6 DW 0
R7 DB 0
R8 DW 0
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS:DATA
START: MOV AX, DATA ; �۲�DATA�ľ���ֵ���˽�μĴ�����ֵ
MOV DS, AX ; �Ա�Բ���������
MAIN: CALL SYSTEM ; ��ʼ��ϵͳ
CALL INIT ; ��ʼ������
STI ; ���ж�
M1: MOV AL, TS ; ���������Ƿ�
SUB AL, TC
JNC M1 ; û�е�����ʱ�䣬����ѭ���ȴ�
MOV TC, 00H ; ����������ֵ�� 0 ������TC ��ͨ��IRQ6�ж�
; �����������
MOV AL, ZVV ; ���㷴���� Yk
MOV AH, 00H
MOV YK, AX ; ��õ��ת�ٵķ���ֵ
CALL PID ; ����PID�㷨����ÿ����� CK
MOV AL, CK ; ���ݿ��������� PWM ����
SUB AL, 80H
JC IS0
MOV
JMP COU
IS0: MOV AL, 10H
MOV
COU: MOV
SUB AL, AAAH
MOV
MOV AX, SPEC ; ������ֵ��SPEC������ CH1
MOV CH1, AL
MOV AX, YK ; ������ֵ��YK�� ���� CH2
MOV CH2, AL
CALL PUT_COM ; ��ʾ����
JMP M1
PUT_COM PROC ; PUT_COM �ӳ���Ϊ������ʾ�ӳ���
; �ɽ� CH1��CH2 ��Ԫ�е�������WMD86
; ���ɻ�����ʾ����������ʾ
PUSH AX
PUSH DX
; 0C0H ϵͳ�� 8251 ���ݿ�
; 0C1H ϵͳ�� 8251 ���ƿ�
MOV AL, 31H ; 00110001b
MOV DX, 0C1H ;
OUT
MOV AL, CH1 ; �ͳ� CH1 �е�ֵ
MOV DX, 0C0H
OUT
WAIT1: MOV DX, 0C1H
IN AL, DX
TEST AL, 01H
JZ WAIT1
MOV AL, CH2 ; �ͳ� CH2 �е�ֵ
MOV DX, 0C0H
OUT
WAIT2: MOV DX, 0C1H
IN AL, DX
TEST AL, 01H
JZ WAIT2
MOV AL, 34H ; 00110100b
MOV DX, 0C1H
OUT
POP DX
POP AX
RET
PUT_COM ENDP
INIT PROC
NOP
CLI
PUSH DS
XOR AX, AX
MOV DS, AX ; �ж�ת������ֵ 0000
MOV SI, 0038H ; IRQ6 �� INT 0EH
MOV AX, OFFSET IRQ6 ; 8259 IRQ6(T0:1ms)
MOV [SI], AX
MOV AX, SEG IRQ6 ;
MOV [SI+2], AX ; IRQ6 �������Ķ�ֵ
MOV SI, 003CH ; IRQ7 �� INT 0FH
MOV AX, OFFSET IRQ7; 8259 IRQ7 (INT0:HR-OUT,COUNT-VVV)
MOV [SI], AX
MOV AX, SEG IRQ7
MOV [SI+2], AX
POP DS
IN AL, 21H
AND
OUT 21H, AL
MOV AL, 80H ; 10000000B B ����� Initiate 8255-B
MOV DX, 63H ; 8255 ���ƿ� 63H
OUT
MOV AL, 00H
MOV DX, 61H ; 8255 B �� 61H
OUT
MOV
MOV DX, 43H ; 8253 ���ƿ� 43H
OUT
MOV AX, 1193 ; ʱ�䳣�� 1193 ���� 1ms ����
MOV DX, 42H ; 8253 ͨ��2 ��42H
OUT DX, AL ; ��ʱ�䳣���Ͱ�λ
MOV
OUT DX, AL ; ��ʱ�䳣���߰�λ
RET
INIT ENDP
SYSTEM PROC
MOV AL, 76H ; 01110110B �� 8253 ͨ��1 ����
MOV DX, 43H ; 8253 ���ƿ� 43H
OUT
MOV AL, 0CH ; ʱ�䳣�� 000CH
MOV DX, 41H
OUT
MOV AL, 00H
OUT
MOV AL, 00H ; ϵͳ�� 8251 ���ƿڣ�0C1H
OUT 0C1H, AL ; �������ĸ� 00H ���� 8251 ���Լ��
CALL DALLY
OUT 0C1H,
CALL DALLY
OUT 0C1H,
CALL DALLY
OUT 0C0H,
CALL DALLY
OUT 0C0H,
CALL DALLY
MOV AL, 40H
OUT 0C1H,
CALL DALLY ;
MOV
OUT 0C1H,
CALL DALLY
MOV AL, 34H
OUT 0C1H,
CALL DALLY
IN AL, 21H ; 8259 ״̬�� 21H
OR AL, 01H
OUT
RET
SYSTEM ENDP
DALLY PROC ; ������ʱ����
NOP
PUSH CX
PUSH AX
MOV CX, 3000H
B2: INC AX
DEC AX
POP AX
POP CX
RET
DALLY ENDP
IRQ7 PROC
NOP ; DS��������������ͬ
PUSH AX
PUSH DX
MOV AL, MARK
CMP AL, 01H
JZ IN1 ; ȡ IRQ6��ת���ۼ�ֵ����������ת��
MOV MARK, 01H ; �趨��־��ÿ�����жϼ���һ��ת�� ����
JMP FINIRQ7
IN1: MOV MARK, 00H ; �趨��־��Ϣ���´��жϲ�����ת��
MOV DX, 0000H
MOV AX, 1000 ;
MOV CX, VADD ; ��¼�Ļ�����������������źŸ���
CMP CX, 0000H
JZ MM1
DIV CX
MM: MOV ZV, AL ; AL ����ת��
MOV VADD, 0000H
MM1: MOV AL, ZV
MOV
FINIRQ7:MOV AL, 20H ;Close IRQ7
MOV DX, 20H
OUT
POP DX
POP AX
IRET
IRQ7 ENDP
IRQ6 PROC
NOP
PUSH AX
INC TC ; TC �� 1 ��Ϊ�������ڼ���
CALL KJ
CLC
CMP MARK, 01H
JC TT1
INC VADD
CMP VADD, 0700H
JC TT1
MOV VADD, 0700H
MOV MARK, 00H
TT1: NOP
MOV AL, 20H ;Close IRQ6
OUT 20H, AL
POP AX
IRET
IRQ6 ENDP
KJ PROC
NOP
PUSH AX
CMP FPWM, 01H
JNZ TEST2
CMP VAA, 00H
JNZ ANOT0
MOV FPWM, 02H
MOV AL, BBBL
CLC
RCR AL, 01H
MOV
JMP TEST2
ANOT0: DEC VAA
MOV AL, 01H
OUT 61H, AL
TEST2: CMP FPWM, 02H
JNZ OUTT
CMP VBB, 00H
JNZ BNOT0
MOV FPWM, 01H
MOV AL, AAAH
CLC
RCR AL, 01H
MOV
JMP OUTT
BNOT0: DEC VBB
MOV AL, 00H
OUT 61H, AL
OUTT: POP AX
RET
KJ ENDP
PID PROC
MOV AX, SPEC
SUB AX, YK
MOV R0, AX
MOV R1, AX
SUB AX, EK_1
MOV R2, AX
SUB AX, AEK_1
MOV BEK, AX
MOV R8, AX
MOV AX, R1
MOV EK_1, AX
MOV AX, R2
MOV AEK_1, AX
TEST R1, 8000H
JZ EK1
NEG R1
EK1: MOV AX, R1
SUB AX, IBAND
JC II
MOV R3, 00H
JMP DDD
II: MOV
MOV AH, 00H
MOV CX, R1
MUL CX
MOV CX, KII
DIV CX
MOV R3, AX
TEST R0, 8000H
JZ DDD
NEG R3
DDD: TEST BEK, 8000H
JZ DDD1
NEG BEK
DDD1: MOV AX, BEK
MOV CX, KDD
MUL CX
PUSH AX
PUSH DX
MOV
MOV AH, 00H
MOV CX, 0008H
MUL CX
MOV CX, AX
POP DX
POP AX
DIV CX
MOV R4, AX
TEST R8, 8000H
JZ DD1
NEG R4
DD1: MOV AX, R3
ADD AX, R4
MOV R5, AX
JO L9
L2: MOV AX, R5
ADD AX, R2
MOV R6, AX
JO L3
L5: MOV AX, R6
MOV CX, KPP
IMUL CX
MOV CX, 1000H
IDIV CX
MOV CX, AX
RCL AH, 01H
PUSHF
RCR AL, 01H
POPF
JC LLL1
CMP CH, 00H
JZ LLL2
MOV
JMP LLL2
LLL1: CMP CH, 0FFH
JZ LLL2
MOV AL, 80H
LLL2: MOV R7, AL
ADD AL, CK_1
JO L8
L18: MOV CK_1, AL
ADD AL, 80H
MOV
RET
L8: TEST R7, 80H
JNZ L17
MOV
JMP L18
L17: MOV AL, 80H
JMP L18
L9: TEST R3, 8000H
JNZ L1
MOV R5, 7FFFH
JMP L2
L1: MOV R5, 8000H
JMP L2
L3: TEST R2, 8000H
JNZ L4
MOV R6, 7FFFH
JMP L5
L4: MOV R6, 8000H
JMP L5
PID ENDP
CODE ENDS
END START
�� ʵ�鲽��
1����ͼ���ߡ�
2����д�����롢���Ӻ�װ�����
3���� Windows �˵��£�ѡ��ʾ�������ܣ���������ٿ��ƿ���ʵ�飬�й���ֵ����ʾֵ֮��Ļ��㷽�����£�
�ٿ�ʵ���и����뷴��ֵ��Ϊ�����ԣ���Ļ��˶�ӦֵΪ FFH������ʱ��̶�ֵ�����������ڲ�ͬ�������¹�ϵ��
ʵ��ʱ��(��) ��(�������ڡ�ʵ�ʿ̶�ֵ)��20
���ת�ٷ�Χ�趨�� 6ת���롫 48ת����֮�䣬�ٶȹ��ͻ�������Ӱ���ϴ�����ȶ�����ȻҲ���ܹ��ߣ����Ҳ���ٶ����ƣ����ת�ٲ����� 4000 ת���֣��� 67ת���롣��������ֵ�� (SPEC) ��ΧԼ�� 06H �� 30H ֮�䣬�ο������и��� SPEC �� 20HΪ 32 ת���롣TS �� 14H������ 8253 OUT2 �� IRQ6 �ж�Ϊ 1 ms���ʲ������� �� 14H * l �� 0.02s �����ʵ�ʿ̶�ֵ �� 900����ʵ����Ӧʱ��(��) �� (0.02x 900)��20 = 0.9s��
�۲���ת�ټ�ʾ�����ϸ���ֵ�뷴��ֵ�IJ��Σ���������Ӧ���ԣ��ı���� IBAND��KPP��KII��KDD ��ֵ���ٹ۲�����Ӧ���ԣ�ѡ��һ��ϺõĿ��Ʋ�������д�±���
|
��Ŀ ���� |
IBAND |
KPP |
KII |
KDD |
���� |
�ȶ�<2%ʱ�� |
|
�ο������в�������Ӧ���� |
0060H |
1060H |
0010H |
0020H |
10% |
10���� |
|
ȥ�� IBAND |
0000H |
1060H |
0010H |
0020H |
|
|
|
�Բ�һ��Ϻò��� |
|
|
|
|
|
|
�� �ο������в�������ȡֵ��Χ������
|
���� |
��λ |
ȡֵ��Χ |
���Ƽ����� |
|
TS |
mS |
00H~FFH |
�������ڣ�����ÿ�ɼ�һ�����ݵ�ʱ�� |
|
SPEC |
N/s |
06H~30H |
��������Ҫ�����ﵽ��ת��ֵ���������Ϊ20H |
|
IBAND |
|
0000H~007FH |
���ַ���ֵ��PID�㷨�л��ַ���ֵ |
|
KPP |
|
0000H~1FFFH |
����ϵ����PID�㷨�б�����ϵ�� |
|
KII |
|
0000H~1FFFH |
����ϵ����PID�㷨�л�����ϵ��ֵ |
|
KDD |
|
0000H~1FFFH |
��ϵ����PID�㷨������ϵ��ֵ |
|
CH1 |
|
00H~FFH |
ͨ��1ֵ������ʾ������������ʾֵ������˵�Ԫ��Ȼ���ٵ��� PUT_COM �����ӳ��� |
|
CH2 |
|
00H~FFH |
ͨ��2ֵ��(ͬ��) |
|
YK |
N/s |
0000H~0042H |
������ͨ������Ԫ����������ĵ��ת�ٷ���ֵ |
|
CK |
|
00H~FFH |
��������PID �㷨�������ڿ��Ƶ��� |
|
VADD |
|
0000H~FFFFH |
ת���ۼӵ�Ԫ����¼���������������ת�ټ��� |
|
ZV |
|
00H~FFH |
ת�ټ������ |
|
ZVV |
|
00H~FFH |
ת�ټ������ |
|
TC |
|
00H~FFH |
�������ڱ��� |
|
FPWM |
|
00H~01H |
PWM�����м��־λ |
|
CK_1 |
|
00H~FFH |
��������������¼�ϴο�����ֵ |
|
EK_1 |
|
0000H~FFFFH |
PIDƫ�E(K) �� SPEC(K) �� YK(K) |
|
AER_1 |
|
0000H~FFFFH |
��E(K) = E(K) �C E(K-1) |
|
BEK |
|
0000H~FFFFH |
����E(K) = ��E(K) �C��E(K-1) |
|
AAAH |
|
00H~FFH |
����PWM ����ߵ�ƽʱ����� |
|
VAA |
|
00H~FFH |
AAAH���� |
|
BBBL |
|
00H~FFH |
����PWM ����͵�ƽʱ����� |
|
VBB |
|
00H~FFH |
BBBL���� |
|
MARK |
|
00H~01H |
|
|
R0~R8 |
|
|
PID ������ |
�� ����֧��
1�����͵Ŀ���ϵͳ�ֿ����ͱջ�ϵͳ
�����������������Ʒ�ʽ���ڿ�������ϵͳ��ֻ���ڿ������Ա��ض���ĵ�����������ã������ڱ�������(�����)�Կ������ķ������á�ϵͳ�Ŀ���Ч��ȡ���ڿ��Ʋ��Ժ����ϵͳ��Ԫ�����ľ��Ⱥ����Ե����ľ�ȷ�ȡ�����ϵͳ�����ż��ڲ������仯��Ӱ��ȱ������������������ϵͳ�ṹ���Ƚ�������ɺ͵������������������������֮��Ĺ�ϵ����֪�������Ŷ���ϵͳӰ�첻���ҿ��ƾ���Ҫ�ߵij��ϡ�
�ջ�������һ�ַ������ƣ��ڿ��ƹ����жԱ�������(�����)���ϲ����������䷴��������������ֵ(�ο�������)�Ƚϣ����÷Ŵ���ƫ���źŲ����������á���ˣ��п���������Ծ��Ȳ��ߡ��ɱ��ϵ͵�Ԫ������ɿ��ƾ��ȽϸߵĿ���ϵͳ�����������������ǣ��뿪���Ƚϣ��ջ���������ź��п���ʹϵͳ����ǿ�����������ȶ������Dz��ñջ�����ϵͳ��ע��ͽ�������⡣
2. PID����
�����ֻ��ֿ���
��������
���������ֳƷŴڣ����������������֮��Ĺ�ϵΪһ�̶ֹ��ı�����ϵ��
3��PWM: ��������
��һ������������ T �ڣ��趨t on���� 0��t �� t on ʱ�̵�ͨ���е���ͨ���������
t on�� t �� T ʱ�̶Ͽ�������ͨ�����������ռ�ձ�����
���� ton / T
;
�� Ud =��Us �� Ud���������ƽ����ѹ��Us�����������ѹ
�ı������ı�ռ�ձ������Ըı���Ƶ�ѹ��������ȣ��ﵽ�ڵ綯�����˻�ò�ͬ��С��ƽ����ѹUd���Ӷ��ﵽ���ٵ�Ŀ�ģ����ֵ��ٷ����ͽ�����������(PWM)��
4. ��������Ԫ��
���������������û���ЧӦ�ƳɵIJ���ת�ٴ���������ν����ЧӦ�������ڴų��еĵ����뵼��ͨ���������������ֱ�ų���������ų��͵�������ֱ�������ϻ����һ�����Ʋ���������û���ЧӦ��ɵ�Ԫ����Ϊ����Ԫ����
ת�ٲ���ԭ�� �ڷǴŲ��ϵ�����Ե��ճ��һ���������Բ�̶̹��ڱ�����ת���ϡ������������̶���Բ����Ե������Բ��ÿ��תһ�ܣ����������������һ�����壬ͨ��������Щ���壬���֪��ת�١�